Physical Distancing Detection System with Distance Sensor for COVID-19 Prevention
Introduction
The COVID-19 pandemic, also known as the coronavirus pandemic, is an ongoing pandemic of coronavirus disease 2019 (COVID-19) caused by the transmission of severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2). It was first identified in December 2019 in Wuhan, China 1. The outbreak was declared a Public Health Emergency of International Concern in January 2020 and a pandemic in March 2020. As of 27 October 2020, more than 43.5 million cases have been confirmed, with more than 1.15 million deaths attributed to COVID-19 2. COVID-19 spreads most often when people are physically close. And, it spreads very easily and sustainably through the air, primarily via small droplets or aerosols, as an infected person breaths, coughs, sneezes, sings or speaks. It may also be transmitted via contaminated surfaces, although this has not been conclusively demonstrated 3,4,5. Airborne transmission from aerosol formation is suspected to be the main mode of transmission. It can spread from an infected person for up to two days before they display symptoms, and from people who are asymptomatic. People remain infectious for seven to twelve days in moderate cases, and up to two weeks in severe cases.
Common symptoms include fever, cough, fatigue, breathing difficulties, and loss of smell and taste. Complications may include pneumonia and acute respiratory distress syndrome. The incubation period is typically around five days but may range from one to 14 days. There are several vaccine candidates in development, although none have completed clinical trials. There is no known specific antiviral medication, so primary treatment is currently symptomatic 6.
Recommended preventive measures include hand
washing, covering one’s mouth when sneezing or coughing, physical distancing,
wearing a face mask in public, ventilation and air-filtering, disinfecting
surfaces, and monitoring and self-isolation for people exposed or symptomatic.
Authorities worldwide have responded by implementing travel restrictions,
lockdowns, workplace hazard controls, and facility closures. Many places have
also worked to increase testing capacity and trace contacts of the infected.
Physical distancing (also known as social distancing) includes infection control actions intended to slow the spread of the disease by minimizing close contact between individuals. Methods include quarantines; travel restrictions; and the closing of schools, workplaces, stadiums, theatres, or shopping centers. Individuals may apply physical distancing methods by staying at home, limiting travel, avoiding crowded areas, using no-contact greetings, and physically distancing themselves from others 7,8. Many governments are now mandating or recommending physical distancing in regions affected by the outbreak. Non-cooperation with distancing measures in some areas has contributed to the further spread of the pandemic.
However, to enforce the rule of physical
distancing by lockdown and related ways in developing countries such as
Ethiopia, it is very tough because of their majority populations are living in
hand-to-mouth life style. So, they need another method that is why this paper
proposed.
In this paper, I have designed the
architecture of physical distancing detection system with distance sensor which
deployed on UAV System with the help of BTS (2G/3G/4G/5G) to enhance the
COVID-19 preventive measures. Besides the architecture, I have also developed a
few algorithms for UAV System operations which sensing, tagging and
disseminating the current distance, position and waiting time of resident’s
information, and forwarding schemes to respective infrastructures and suspected
residents including the security force.
The paper is organized into two broad sections
followed by conclusion, recommendations, acknowledgement and references.
Section II describes about the related works in detail. And, section III gives
a deep design of the architecture of the proposed solution with the developed
algorithms.
Related
Work
Enforcing Social Distancing Policies with Proximity Sensors
In 9 a proximity detection and contact tracing for COVID-19 has been presented. The press released different techniques to enhance the workplace safety by enforcing social distancing policies with proximity sensors. The main objectives of the press are to ensure that people are keeping the safe distance between each other and reduce virus interactions, avoid temporary shutdowns of operating factories with enhanced safety measures and track all the interactions between the infected and healthy people to identify a contamination cluster.
The press has presented five basic
techniques or solutions to proximity detection and contact tracing for
COVID-19. As a first technique, each employee can be equipped with a compact
wearable proximity sensor which enables easy monitoring of interactions within
the common areas, also working alongside security badges for access control
when the sensors record that two or more people have exceeded the safety limit,
it warns them with an audible or visual alarm. In addition, as an optional,
there is a centralized monitoring of contact events which can afterwards help
back-track contaminations chains, making it easy to locate contamination
clusters. In the second technique, zoning policy enforcement, factory floor is
subdivided into zones to limit spread of COVID-19. It help workers remain
within their assigned zones by audio notification and optionally inform the
management if worker repeatedly violates the zoning policy. In the third
method, density policy enforcement, the audio warning help employees respect
maximum density of shared areas (e.g. rest and food areas, meeting rooms). And,
the employee to employee proximity monitoring takes in account distance and
time. As like as the first method, this method also has two options. As a first
option, there is a centralized monitoring and violation reporting, and as a
second option, there is a back-tracking of infection chains. In the fourth
method, sanitization of shared assets, the worker presence in front of
shared-use asset can be analyzed using proximity detection. The asset requires
only inexpensive Bluetooth Beacon and the disinfect assets based on usage
metrics. And, it ensure traceability of cleaning operations with a list of
visited WiFi/BLE SSIDs or another Abbeeway device. In the final method,
Nurse-call bedside buttons in hospitals, the non-medical facilities get
converted to hospitals to manage large influx of Coronavirus patients. The
patients in these facilities need nurse call-buttons – Tracker has button and
can locate bed. And also, the trackers can be used to monitor usage and prevent
loss of medical equipment (e.g. Respirators).
The press has also presented in
technical perspectives (from devices to screens – processing positioning
information at the edge of the LPWA network to deliver actionable data to
business applications) as follows:
The Abeeway Smart Badge™ detects
other Smart Badges in the vicinity using BLE beaconing and scanning, it
evaluates peer to peer proximity as well proximity to monitored shared-use
assets. Devices send an alert when certain risk levels are exceeded (thresholds
are configurable). Optionally, devices can be located using GPS, Low-power GPS,
WiFi Sniffing or BLE.
Then the data about those encounters
is transmitted via long range, ultra-low power LoRaWAN® wireless network on
private or public infrastructure, providing low cost connectivity & low
Total Cost of Ownership. Actility’s ThingPark Platform is used for devices and gateways
operations support system (OSS), data transfer and security.
ThingPark platform transforms the
date and allows IoT applications to leverage it via integrated API’s and
drivers.
The platform is integrated with Business Applications and Clouds (AWS, IBM Cloud, Microsoft Azure, My Devices, PTC Thing Worx, Sales Force, WMW, etc). Those business applications provide policy compliance overview, back tracing capabilities and business rule engine.
However, the work considered only the
indoor surroundings such as business centers and industries, thus further
exploration on outdoor conditions such as open market places and concerts are
needed. Furthermore, the work completely depends on the behalf of the workers
because of if one worker off the wearable proximity sensor, the work cannot
enforce the social distancing policies. And also, the work presented the
centralized monitoring of contact events as optional but it should be mandatory
to ensure the enforcement of social distancing policies.
Enforcing Social Distancing Policies with Proximity Sensors
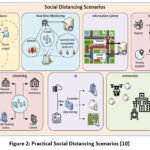
In 10 a comprehensive survey and open problems on enabling and emerging technologies for social distancing has been conducted. The work intentions to provide an inclusive background on social distancing as well as how emerging technologies, e.g., wireless and networking, machine learning, artificial intelligence (AI), computer vision, thermal, ultrasound can enable, encourage, and even enforce social distancing practice.
The authors have identified/proposed
a practical social distancing scenarios in the survey. The scenarios can be
briefly classified as follows:
Keeping Distance: In the scenario, various positioning and AI technologies can assist in keeping sufficient distance (e.g., 1.5m apart) among people. Based on that, when a person gets too close to another or a crowd, the person can be alerted (e.g., by smartphones).
Real-time Monitoring: Many wireless and related technologies can be utilized to monitor people and public places in real-time (without compromising citizens’ privacy). The purposes of such monitoring are to collect meaningful data (e.g., numbers of people inside buildings, contacts, symptoms, crowds, and social distancing measures violations) to facilitate social distancing.
Information System: Technologies such as Bluetooth, Ultra-wideband, Global Navigation Satellite Systems (GNSS), and thermal can be employed to collect the trajectory data of the infected individuals and the contacts that these individuals made.
Incentive: Social distancing has negative impacts on personal freedom and the economy. Therefore, incentive mechanisms are needed to encourage people to comply with social distancing measures (e.g., incentivize people to share their movement data and self-isolate). Optimization techniques and technologies such as Bluetooth, WiFi, and cellular together with economics tools like game theory, auctioning, and contract theory can facilitate those incentive mechanisms.
Scheduling: Various scheduling methods can be employed to increase the efficiency of workforce and home healthcare service scheduling, thereby decreasing the number of employees at workplaces and patients at hospitals. Moreover, scheduling techniques can also be applied for traffic control to reduce the number of vehicles and pedestrians on the street. Furthermore, technologies such as WiFi, Radio Frequency Identification (RFID), and Zigbee can be applied for building access scheduling.
Automation: In the social distancing context, autonomous vehicles such as medical robots and unmanned aerial vehicle (UAV) can be utilized to reduce the need for human presence in essential tasks, e.g., medical procedures and delivery services. Technologies such as ultra-wideband, GPS, ultrasound, and inertial sensors can be leveraged for the positioning and navigation of these autonomous vehicles.
Modelling and Prediction: AI technologies can be employed for pandemic data mining. The results can help to predict the future trends and movement of the infected and susceptible individuals. Moreover, AI-based classification algorithms can be leveraged to detect disease symptoms in public places.
However, all these proposed scenarios are not respect the citizens’ privacy as well as the scenarios are completely depends on the consensus of the residents.
The work has presented an important
open issues and challenges, (e.g., privacy-preserving, scheduling, and
incentive mechanisms) in implementing social distancing in practice. As an
example, instead of reacting with ad-hoc responses to COVID-19-like pandemics
in the future, smart infrastructures (e.g., next-generation wireless systems
like 6G, smart home/building, smart city, intelligent transportation systems)
should incorporate a pandemic mode in its standard architecture/design.
Design of the Proposed Solution
As I have discussed in related work,
different technologies are very significant to enforce the physical distancing
policies. Most of current works on physical distancing enforcement are focusing
on indoor environments and they completely depends on the behalf of the
residents/workers because of if one resident/worker off the wearable proximity
sensor (a technology that support to enforce the physical distancing policies),
the resident/work cannot apply the policies. And also, the works presented the
centralized monitoring of contact events as optional but it should be mandatory
to ensure the enforcement of physical distancing policies. Hence, to overcome
these limitations (particularly on outdoor/high coverage area) as much as
possible, I have proposed the architecture of physical distancing detection
system with distance sensor which deployed on UAV System with the help of BTS
(2G/3G/4G/5G) to enrich the COVID-19 preventive measures, as well as I have
also developed a few algorithms for distance sensor (on UAV System) operations
which sensing, tagging and disseminating the current distance, position and
waiting time of resident’s information, and forwarding schemes to respective
infrastructures and residents including the security forces.
Architectures of the Proposed Solution
I describe and present the overall
architecture of my proposed system on potential spots such as pedestrians’
walkways, restaurants, taxi fermatas, stadiums and open shopping centers as
shown in Figure 1.4. As a first section, I describe and present my proposed
distance sensor on UAV System operations which periodically sensing, tagging
and disseminating the current distance, position and waiting time of resident’s
information with MAVLink and other related packets. As a second section,
approaches and objectives of forwarding models of the sensed information
(tagged packets) to the respective infrastructures and residents including the
security forces are discussed. And, as a final section, I discuss and present
the general proposed architecture states.
Figure 1.4 shows the general
low-level architecture of the proposed system on potential spots such as
pedestrians’ walkways, restaurants, taxi fermatas, stadiums and open shopping
centers. In this low level architecture, I have designed four major wireless
and wired infrastructures (UAV System, UAV’s GCS (Gateway Control Station), BTS
(2G/3G/4G/5G) and Central Control Station (like data center)) with their
respective locations and the communication range of each wireless
infrastructure is considered as an ideal cell.
I have supposed that the proposed
single small UAV system is a full autonomous Quadrotor Drone (4 rotor wing)
type which does not require any direct human intervention for flying (uplink
communication) and it capable to hover on a specific area for a while. The
system has deployed around on the potential spots/areas with about 10m altitude
(height) of UAV flight from the ground and its transmission range covered
nearby 150–200m, and completely confined by the transmission range of BTS
(2G/3G/4G/5G). The drone has a hovering motion over the area of sensing
operation and proceed a different types of communications such as with residents’
mobile phones, BTS (2G/3G/4G/5G) and central control station via IEEE 802.11b/g
interface with the help of its CCT BS/GCS.
In the proposed architecture/model, I
have only used a downlink communication that a UAV broadcasts the sensed
information (tagged packet) within coverage area. In order to this, the
residents’ mobile phones and GCS will receive the broadcasted packet via LOS or
direct radio link of IEEE 802.11b/g communication. In addition, the GCS which
being in the proposed model has also used as a gateway to facilitate a
communication among UAV-to-BTS (2G/3G/4G/5G) and UAV-to-Central control
station.
Whereas the BTS (2G/3G/4G/5G) network
has designed on the road segment as one of the wireless access network
infrastructures. I supposed that the BTS (2G/3G/4G/5G) cell covered about 1km
which means it can completely cover the coverage area of the other deployed
infrastructures as shown in Figure 1.4. And, the network can communicate with
the UAV System through its core network (Base Station Center/BSC). As well as,
the BTS (2G/3G/4G/5G) network can make a direct communication with residents’
mobile phones.
Central Control Station (Centralized
Data Center) has also designed on the road segment. The control station is
connected with Internet (Cloud/Gateway) to communicate with the designed
infrastructures including the security forces’ mobile phone. Moreover, I have
considered few basic assumptions when I design the proposed architecture. For
instance, all residents and security forces have a mobile phone.
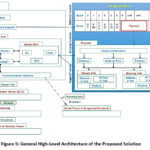
Figure 1.5 that shown on the below depicts the overall high-level architecture that will be implemented in the proposed system in a potential spots like open markets. Generally, the architecture has four core modules, Unmanned Aerial Vehicle (UAV), BTS (2G, 3G, 4G, 5G – Mobile Networks), Central Control Station (Data Center) and Residents and Security Forces Mobile Phones respectively. And also there are four major proposed forwarding schemas that from Distance Sensor (DS) on UAV to Central Control Station (Data Center), Central Control Station (Data Center) to BTS (2G/3G/4G/5G, BTS (2G/3G/4G/5G) to Suspected Residents (Residents’ Mobile Phones), and Distance Sensor on UAV to Suspected Residents (Residents’ Mobile Phones).
In the UAV module, there are four major layers such as application, network & transport, processing unit, and communication layers respectively 11,12 as revealed in Figure 1.5 as shown below. The communication layer has capable to transmit and receive various data from/to other UAV and/or GCS via IEEE 802.11b/g based RF transceiver. In the processing unit layer, there are three major internal modules such UAV Controller (FCS), Task/Mission Manager and Sensor Unit. The primary operation of UAV controller is reads and analyzes data from a wide variety of sensors and produces a mission flight plan, and it has direct communications with sensor unit and task manager modules. Task/Mission Manager module is responsible for registering new and monitoring ongoing missions, and it has three direct communications such with sensor unit module, task manager module and communication interface layer. The third module of processing unit layer is a sensor unit which responsible for detecting and measuring a different stimulus and signal of UAV’s internal part and sensing operation area. In this module, there are many well-known sensors are installed, such as GPS for navigating a position of UAV and operation area, Distance Sensor (DS) for measuring the distance of residents being in the operation area and Timer for determine the waiting time among nearest residents from operation area. The network and transport layer of UAV is a fundamental layer that primarily responsible for routing a MAVLink packet 13 and end-to-end communication via UDP or TCP/IP respectively. Whereas, the last layer of UAV module is application layer that accountable for supporting and providing different services such as mapping, surveying, traffic controlling, military operation and border monitoring. However, those applications are depending on the type and capacity of UAV.
As presented in Figure 1.6, the 2G/3G/4G/5G – Mobile Networks module has two major components which named as BTS/NodeB/eNodeB (eNB) / gNB and BSC/EPC Server (Gateway) respectively. The BTS/NodeB/eNodeB(eNB)/gNB is a fixed base station that has GSM/UMTS/E-UTRAN/NR interfaces (radio technologies). And, it can transmit and receive different data and signals from/to residents and security forces mobile phones via its own transceiver antenna within a cell. Whereas, BSC/EPC Server (Gateway) has encapsulate and control the core network of 2G/3G/4G/5G which includes different respective gateways such as S-GW and PDN-GW.
The Central Control Station (Central Data Center) module which demonstrated in Figure 1.6 has three basic layers. They are core network, aggregation network, and access network. The core network layer is responsible for connecting the data center (central control station) to the Internet. The aggregate network layer is responsible to make interconnect together multiple access layer switches and also it is connected to each other by core network layer switches. Whereas, the access network layer is responsible for connecting end-users or end nodes such as PCs and printers. And it supposed to facilitate the continuous network connection of the end devices no matter where they are located. Moreover, all layers are connected to each other directly and indirectly.
As shown in Figure 1.6, the Residents and Security Forces Mobile Phones module has three major layers. They are hardware layer, middleware layer, and application layer respectively. The hardware layer is responsible to make a connection with the middleware layer services such as data storage, location management, and communication management. The middleware layer is responsible to facilitate a communication between hardware and application layers. The application layer is responsible to offer different services/application to user and to facilitate a communication with middleware layer.
The UAV Periodically Sensing, Tagging and Broadcasting of Residents Distance, Position and Waiting Time Information
In this section, I have proposed UAV
periodically sensing, tagging and broadcasting operations of the current
distance, position and waiting time of residents’ information with a single
small UAV to enforce the physical distance policy. Next, I discussed every
UAV’s proposed operation as follows.
Periodically Sensing Residents’ Distance, Position
and Waiting Time Info within UAV Coverage Area
In this first task of the proposed
high-level architecture model, I have only used a downlink communication that a
UAV broadcasts the sensed information (tagged packet) within coverage area. In
order to this, the residents’ mobile phones and GCS will receive the
broadcasted packet via LOS or direct radio link of IEEE 802.11b/g
communication. In this work, I have interested to periodically sense the
distance, position and waiting time of residents within UAV’s transmission
range. To achieve this, the UAV will periodically broadcast a beacon or Hello
message to residents’ phone within its transmission range, and if the message
is received by the residents then I will use a UAV’s DS, GPS and Timer to
detect current distance, position and waiting time of residents respectively.
As shown, in Figure 1.4, the UAV’s transmission range has covered the road and
some potential spots; thus the residents who being in these spots would be
detected by UAV’s sensors. And, the detected information will be organized as a
danger or a warning information and stored in a payload of MAVLink packets as I
have discussed follows.
Tagging a Sensed Information in a MAV Link
After completing the UAV’s sensing operation, the sensed information will be tagged in a MAV Link packet via UAV. In this tagging operation phase, I will organize the sensed information as a danger or a warning message. To proceed the organization process, I have proposed a model that helps me to arrange the sensed information in an easy manner. Additionally, this proposed model is not only significant for arranging the sensed information even it is very compulsory to forwarding the information to the respective infrastructures and residents including the security forces.
The Proposed Model of Danger and Warning Information
Generally, in the proposed model, any
periodically sensed information in the coverage area of UAV System only
consists the distance, position and waiting time between nearest residents.
Then based on this circumstance, I have proposed a model of danger and warning
info and optimize the forwarding of the information to the target
infrastructures and residents. I have discussed this proposed model in details
as shown as below.
I have assumed that if the distance between nearest residents is less than 2 meter and their waiting time for less than 1 minute, there is no a high likelihood to expose the COVID-19. And, the distance among the nearest residents denoted by D, their waiting time represented by T and the all sensed information which consists the distance, position and waiting time of residents within the coverage area of UAV denoted by I. Therefore, if the distance among the nearest residents is less than 2 meter and their waiting time is more than 1 minute, I will be classified as a danger information and tagged in the Danger Info module of the proposed work in the payload of MAV Link packet. Whereas if the distance among the nearest residents is less than 2 meter and also their waiting time is less than 1 minute, I will be classified as a warning information and then tagged in a Warning Info Module.
I = D < 2m and T > 1m’ …….. Danger Info (DI)
I = D < 2m and T < 1m’ ……. Warning Info (WI)
Where, D is distance, T is time, m is meter, and m’ is minute.
After accomplishing the tagging
process, the UAV will proceed the forwarding schemes based on the tagged info.
Algorithm 1.1 shows the pseudo code of UAV sensing, tagging and
broadcasting operations of resident’s info on potential spots.
Input: Residents n
Process
UAV (Drone) broadcast a beacon message in every 0.5 seond within its own range
While (Residents received a beaconed message) Do
UAV sense a current distance (D) among nearest residents // by Distance Sensor (DS)
UAV sense a current position of residents // by GPS
UAV sense a current waiting time (T) among nearest residents // by Timer
IF (the current distance (D) among nearest residents < 2 meter && the current waiting time (T) among nearest residents > 1 minute)
The UAV tag all of the above sensed information (I) in Danger Info module //DI
Drone broadcast the tagged packet to the central control station via CCT BS
ENDIF
ELSE
IF (the current distance (D) among nearest residents < 2 meter && the current waiting time (T) among nearest residents < 1 minute)
The UAV tag all of the above sensed information (I) in Warning Info Module //WI
Drone broadcast the tagged packet within its own coverage area
ENDIF
ENDWhile
Output: Residents Info on potential spots is sensed, tagged and broadcasted in a MAVLink Packet
The Proposed Forwarding Model of The Tagged Information To Infrastructures And Residents
In this section, I have discussed the proposed forwarding model of the tagged information to infrastructures and residents. Generally, there are two proposed forwarding schemes as stated below.
1st Forwarding Scheme
The distance sensor (DS), timer and
GPS on UAV sense the current distance, waiting time and location of the
residents on UAV’s coverage area. And, if the sensed distance is less than 2m
and the waiting time is more than 1 minute then immediately the UAV forward the
Danger Info to Central Control Station (CCS) via its own Ground Control Station
(GCS), and the CCS check the location (the nearest) security forces and forward
the info to them via BTS (2G/3G/4G/5G) as stated in Algorithm 1.2.
Input: Residents n
Process
While (GCS received the tagged packet from UAV) Do
IF (the current distance (D) among nearest residents < 2 meter && the current waiting time (T) among nearest residents > 1 minute)
GCS forward the tagged packet (DI) to the CCS
CCS forward the packet to Security forces (the nearest to suspected residents) via BTS (2G/3G/4G/5G)
ENDIF
ENDWhile
Output: The Danger Info (DI) is forwarded and delivered to Security Forces who nearest to suspected residents
Algorithm 1.2: Algorithm for Forwarding of Danger Info to Security Forces who nearest to Suspected Residents
2nd Forwarding Scheme
The distance sensor (DS), timer and
GPS on UAV sense the current distance, waiting time and location of the
residents on UAV’s coverage area. And, if the sensed distance is less than 2m
and the waiting time is less than 1 minute then immediately the UAV directly
broadcast the Warning Info to the suspected residents who being on the UAV’s
coverage area as stated in Algorithm 1.3.
Input: Residents n
Process:
IF (the current distance (D) among nearest residents < 2 meter && the current waiting time (T) among nearest residents < 1 minute)
UAV directly broadcast the tagged packet (WI) to the Suspected Residents who on being UAV’s Transmission Range
ENDIF
Output: The Warning Info (WI) is directly forwarded/broadcasted to the suspected residents who being on UAV’s coverage area
Algorithm 1.3: Algorithm for Direct Forwarding/Broadcasting
of Warning Info to Suspected Residents who being on UAV’s Transmission Range
Conclusion
The suggested preventive measures of COVID-19 by WHO
include hand washing, covering one’s mouth when sneezing or coughing, physical
distancing, wearing a face mask in public, ventilation and air-filtering,
disinfecting surfaces, and monitoring and self-isolation for people exposed or
symptomatic. Thus, this article proposed the architecture of physical distancing
detection system with distance sensor which deployed on UAV System with the
help of BTS (2G/3G/4G/5G) to enrich the COVID-19 preventive measures, as well
as I have also developed a few algorithms for distance sensor (on UAV System)
operations which sensing, tagging and disseminating the current distance,
position and waiting time of resident’s information, and forwarding schemes to
respective infrastructures and suspected residents including the security
forces.
Recommendations
Though I did my
best to propose the architecture of physical distancing detection system with
distance sensor which deployed on UAV System with the help of BTS (2G/3G/4G/5G)
to enrich the COVID-19 preventive measures, as well as I have also developed a
few algorithms for distance sensor (on UAV System) operations which sensing,
tagging and disseminating the current distance, position and waiting time of
resident’s information, and forwarding schemes to respective infrastructures
and residents including the security forces, I do not trust that the
architecture is standard enough to incorporate potential matters in networking
discipline. For example, despite the importance of the issue, I have not
considered the security and privacy aspect of the networking science in my
architecture since it was beyond the scope of this work. Thus, I hope that the
proposed architecture can be enriched in such a way that the security is taken
into account.
Regarding
implementation (simulation), I have not considered/implemented the proposed
architecture and forwarding algorithms. Therefore, I believe that the proposed
architecture with its forwarding schemes can be enriched in such a way that
their implementation is taken into account.
Furthermore,
regarding infrastructure deployment consideration, I have not considered an
optimal deployment of multiple UAVs (Drones) to proceed UAV’s operations
(sensing, tagging, and broadcasting of the current distance, waiting time and
location of the residents information within UAV coverage area) on different
potential spots. Hence, I hope that the proposed architecture can be enriched
in such a way that the optimal deployment of multiple drones on different
potential spots is taken into account.
Acknowledgments
This work would not have been possible without the endless support of son of St. Merry, Almighty God, thus we praise always the name of him and his mother. In addition, this paper is dedicated for my beloved country, Ethiopia.
Conflict of Interest
The authors do not have any conflict of interest.
Funding Source
The author(s) received no financial support for the
research, authorship, and/or publication of this article.
References
- “Novel
Coronavirus – China”. World Health Organization (WHO). Retrieved 9 April 2020.
- “COVID-19
Dashboard by the Center for Systems Science and Engineering (CSSE) at Johns
Hopkins University (JHU)”. ArcGIS. Johns Hopkins University. Retrieved 27
October 2020.
- “Transmission
of COVID-19”. European Center for Disease Prevention and Control. Retrieved 12
September 2020.
- “Q&A:
How is COVID-19 transmitted?”. World Health Organization (WHO). Retrieved 12
July 2020.
- “Transmission
of SARS-CoV-2: Implications for Infection Prevention Precautions” (PDF).
www.who.int. World Health Organization. 9 July 2020. Archived from the original
on 9 July 2020. Retrieved 18 September 2020.
- “Q&A on
COVID-19: Basic Facts”. www.ecdc.europa.eu. 25 September 2020. Retrieved 8
October 2020.
- “Advice for
Public”. World Health Organization (WHO). Retrieved 8 February 2020.
- “Coronavirus
Disease 2019 (COVID-19)”. U.S. Centers for Disease Control and Prevention
(CDC). 11 February 2020. Retrieved 4 March 2020.
- “Proximity
Detection and Contract Tracing for COVI-19”. Actility Newsletter. Press
Release, Paris, France. Retrieved 31 July 2020.
- C. T.
Nguyen, etal. 2020. Enabling and Emerging Technologies for Social Distancing: A
Comprehensive Survey and Open Problems. arXiv:2005.02816v2 [physics.soc-ph].
- O. K.
Sahingoz, “Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and
Challenges”, Springer Science+Business Media Dordrecht, DOI
10.1007/s10846-013-9959-7, 2014.
- T. Kekec, B.
C. Ustundag, M. A. Guney, A. Yildirim and M. Une, “A Modular Software
Architecture for UAVs”, Sabanci University, Istanbul, Turkey.
- N. Reker, D.
Troxell and D. Troy, “Universal UAV Payload Interface”, California Polytechnic
State University, San Luis Obispo, USA, June 12, 2015.

This work is licensed under a Creative Commons Attribution 4.0 International License.