Introduction
How do managers take decisions?What do they depend on in making decisions? To understand the ideas behind the dynamic decision making it is essential to understand the process of making decisions. Utilizing information in a good way in organizations is considered the biggest bottleneck and more challenging than collecting it. The speed of change rate in online environments makes it essential to figure out how can decisions be taken with less erroneous results and then the dependence on human decision makers will need a second look.
The environments that witness rapid change and involve making decisions; require reductions in the lag time between the decision making and the effect of change. Neither the knowledge needed of how individuals rely on this accumulated experience to make decisions in dynamic situations neither the knowledge even is known about how these decisions improve with practice are complete enough to rely upon [3].
The paper is organized as follows: Section 2 describes the problem which this paper tries to analyze and literature and related problem issues review. Section 3 introduces the methodology and the experiment which took place in this paper. Section 4 represents the results and section 5 includes discussion of those results. Finally the conclusion and future work.
Research findings
Related works
(Gonzalez and Quesada, 2003) had shown that learning to perform dynamic decision-making (DDM) tasks is difficult, mainly because of the dynamic complexity of these tasks. Dynamic complexity comprises time delays, feedback loops, stock and flow structures, and nonlinearities. They have mentioned that in order to improve the understanding of how individuals learn to make better decisions in a dynamic system, they need to investigate the human process of recognition.
The methodology they have used which was an excellent representation and justification of the concept of DDM was based on collecting data by using an on-line system which was designed to reproduce the structure and complexity of a dynamic real-world task (referred to as micro-world) for the sake of studying the real time dynamic decision tasks and how it is effected by the rate of change in respond to time, the researchers found out (using the empirical study and analysis to water Purification Plant (WPP) which involve distributing water under time constraint) that the decision makers reuse their past decisions, and that this reuse explains why similarity predicts performance. This assumption holds in specific types of the task (consistent); the applicability of this assumption depends on the structure of the task (i.e., the consistency of the environment). In an alternative micro-world with more diverse circumstances, this effect may not hold. In addition, they determined that the recognition process is influenced by a combination of task features rather than by individual features[3].
Through studying the effect of time constraints on learning in dynamic decisions byGonzalez in a different research paper the results obtained confirm the negative effects of time constraint on the performance in static decision making and also on dynamic environment. The results showed that the repetition of tasks is not synonym of learning and so the results with time limits can be explained by intellectual abilities and time limits (short or long) since decision makers use past outcomes and adapt past decisions to environmental changes, again here the researcher depends on micro-world to justify the results and simulate the situation in the WPP environment. The researcher viewed a detailed data collection method and accurate analysis to derive relations and articulate results to help improving the work in this area and beautifully satisfy abstract points[6].
(Wang, and Guenther, 2007) The researchers in this work argues that there still a lack in the mathematical base studies of the problem of decision making in real time environment and thus they present a fundamental cognitive decision making process and its mathematical model, which is described as a sequence of Cartesian-product based selections.
A rigorous description of the decision process in real-time in algebra is represented by the paper, it also discusses the cognitive – representing basic literature review of related work and theories and found that the most fundamental decision that is recurrently used in any complex decision system and everyday life is a Cartesian product of a set of alternatives and a set of selection Criteria.
Since the researcher used a mathematical approach to explain the nature of decisions in human and machine-based decision making. They found that larger both the sets, the more ideal the decisions generated. Another finding of this paper is that, although the cognitive complexities of new decision problems are always extremely high, they become dramatically simpler when a rational or formal solution is figured out. Therefore, the reducing of cognitive complexities of decision problems by heuristic feedbacks of known solutions in each of the categories of decision strategies will be further studied in intelligent decision support systems. The simulation models and cognitive processes of decision-making provided in this work can be applied in a wide range of decision-support and expert systems [2].
DDM Basic Overview
Dynamic decision-making (DDM)
encompasses sequences of multiple and interdependent decision making that takes place in environments that change over time, the time required to make decision in such situations is relative to pace of change in the decision environment. Decisions in changing environments are more complex and occur in real time requiring investigating the level to which people use their past knowledge and experiences to control specific complex system and type of experience [6].
The change in the environment may happen either because of a new condition arrival that may result of a previous action in the system or in response to a decision maker’s actions, and that’s why it requires multiple and interdependent decisions. Studies have shown that decision makers who learn the input and output signals required to get control of a system which do not necessarily exhibit improved performance [3].
Theories related DDM
The process of modifying a system to improve its succeeding performance of the same tasks or multiple tasks generated from the same population is known as learning. The main theories of DDM are strategy based theory and connectionism based theory and Instance based theory.
Strategy based theory
This style of learning in DDM relies on rules and strategies associated with specific task. Where conditions are specified and actions under certain rule apply. Several studies addressed the implementation of mimic worlds to test the learning theory based on strategies in an environment such as the production rules by Anzai who studied cognitive control of real time event-driven systems which perform the DDM task of steering a ship through a certain set of gates. Lovett and Anderson study of using if-then rules in the building-sticks task which is an isomorph of Lurch-inswater jug problem.
Field such as robotics, space, sea and exploration systems will attain a advanced extent of autonomy through cognitive function. Cognitive control systems for manufacturing plants will be associated to plant operators and engineers; less human intervention will be necessary even as the safety and performance of plants improve. [1]
Connectionism learning theory
Studying the connection between units in terms of weight and strength which depend on previous experience Therefore, the output of a given unit depends upon the output of the previous unit weighted by the strength of the connection as an example the neural networks model [13].
Instance-Based Learning Theory (IBLT)
where psychological theories of memory and categorization are incorporated in. Learning mechanisms that are crucial to skill development in DDM are instance-based knowledge, recognition-based retrieval, adaptive strategies, necessity, and feedback updates. Two of these learning mechanisms, instance-based knowledge and recognition-based retrieval, are relevant to the study presented here.[3]
Figure1 shows one type of dynamic decision making styles which is instance based learning technique and the tasks involved in the process.
The decision-making cycle can be described by an instance, which contributes as the situation, the decision made, and the expected utility of the decision in that situation (Situation, Decision, Utility – SDU). This theory involves identifying instances of highest utility from memory where similarities between situations (under assessment and earlier stored in memory) are to be evaluated.
The efficient use of feedback to improve performance is dependent on a decision maker’s ability to recognize similarity between current and past situations. According to IBLT, similarity is examining that decision makers under time limitations use without having complete information.[3].
In Real world of decisions making, there are two experimental paradigms: decisions from sampling: where experience is acquired by exploring an environment without significant consequences, before consequential decisions are made. And consequential repeated decisions: where we cannot sample the options but rather learn while making choices and from past choices, perceiving the outcomes and adjusting our decisions to the consequences [12,7].
Characteristics of DDM SYSTEMS [5]
Dynamic decisions specify what should be and when a specific action should take place, hence time is a very important property of any dynamic decision technique especially for on line environments.With reference to figure1, the dynamic tasks control a changing system they must receive feedback of system’s state. Performance is influenced by feedback; when the decision makers receive delayed feedbacks rather than immediate feedback and a sequence of decisions taken continuously which need an accurate model of relations between factors and the features.
Understanding these feedback mechanisms is essential for effective management of any complex system since management systems like production, acquisition, logistics and technology development consist of complex, non-linear feedback inter relationships. Most feedback systems are too complex to produce mental analysis. The need for experimental tasks is to translate real life situations into a wide range of control environments such as simulated economies, tribes, and medical diagnosis. In most experiments, time has been sliced up into discrete units and the problem has been presented to the subject in terms of a series of trials. [5, 9]
Methodology and experiment
The objective of this experiment is to develop dynamic decision that depends on the information gathered by the robot from different sensors. Sensor based robot control is viewed as a hierarchical structure with several spectators and capable of integrating data from multiple sensors. The experiment deployed the strategy based theory and the continuous feedback of the state of the environment to build up the decisions consistently.
The robot used is of type LEGO MINDSTORMS NXT 2.0 this was attached to two types of sensors: ultrasonic and light sensor. Where light sensor enables the robot to distinguish light and dark, and decide the light intensity in a room or the light intensity of different colors. The ultrasonic sensor is robot’s eyes!, it helps the robot to judge distances and see where objects are! Also is able to detect an object and measure its proximity in inches or centimeters.The DDM model approach used in the robot was programmed using NXT. The robot tested the movement decisions to be followed based on the data extracted of sensing the surrounding environment.
The DDM model approach used in the robot was programmed using NXT. The experiment tested the ability of the robot to avoid any obstacle while following a line (red line on black surface and another situation where it was black on white surface and also blue on a white surface) the test took place in the normal room light with or without the extra daylight or darkening the lights in the environment.
It will use the ultrasonic sensor waves to check on the existence of any barrier (barriers used varied in size, length and material). The rue strategy given was to control the robot to follow the line and if any obstacle found in the way of distance of 20 Centimeters it should go backward 1 rotation.
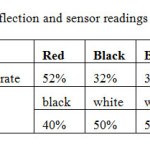
Following the line if it’s black for example is implemented by measuring the reflected light of the colors. For example in one case of the tested environments the black color gave a reading of 33% and the red color measured 52% and the if-then rule depended on the average of the two colors.
Those Assistive technologies which are enabling humans to strengthen or balance and simulate their capabilities, with systems that interpret their intent, make context based decisions much clearer, and allow people to operate beyond their diminished or normal physical, cognitive or sensory capabilities. [11]
Results of Experiment
The experiment runs on 3 basic situations and in different lightening situation in a room and different types of obstacles:
- Black surface and red line.
- White surface and black line.
- White surface and blue line
Experiment has been repeated more than 20 times, I found that the accuracy of the results depends highly on the surrounding environment input and how rapidly does it change. The change in the material used in each of the used lines to be followed by the robot effected the measurement of the reflection also the change in the lights applied in the room which affected the accuracy of the decisions made by the robot.
The lightning level in the environment will affect the readings of the light sensor since the rate of reflection differs in various situations. For the distance control depending on the readings by the ultrasonic sensor, the results also witnessed a difference referred to the type of the obstacles used; I found that it generated the most accurate readings with human bodies and much solid objects were used.
The analysis and design of feature-based control strategies to achieve consistent dynamic performance is addressed. For vision sensors, such an image-based visual control is shown to provide stable and consistent dynamic control within local rules of the observer. Simulation studies of two- and three-degree-of-freedom systems show the application of an adaptive control algorithm to overcome unknown and nonlinear relations in the feature to world space mapping.[7]
Discussion
The robot can simulate human thinking and information handling of some situations, and generate correct orders (e.g. following a line or turning backward) to effectively find targets and avoid obstacles. For the model used in the experiment, it should be improved in regard to the recognition rate and the capabilities of measuring the surrounding environments should be enhanced in order to respond more accurate and faster to any change in the environment and make decisions relatively built upon past data and new happenings in the environment.
The use of the strategy based learning technique in robotics, improvements and more enhancements will lead to new evolution in the field of making critical decisions in production and changing the structure in several organizations if deployed it correctly. Since the decisions located at one physical location then it will minimize number of processors required [4]. Knowledgebased equipment’s with the dispersed platform support critical decision making which can be shared within the various modules.
In reference to table1 we can understand why some results were in-accurate in the first place. The reading of the black and blue colors was very much similar and a small change in the lightening effect in the room which caused a change in how the robot interact and respond to the rule used in the programming code; when blue and black color interfere it is possible that the robot will not distinguish between them.
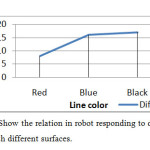
On the other hand the experiment applied on the black line with a white surface or blue with black surface generated better results that the robot following a red line on a black surface. The reason is referred to the relation between the average of the readings of the light reflected between the line color and the surface in relation to the surface reading color.The difference in the case of red line with white surface is slightly small if compared to the difference between the readings in blue or black line situations refer to Figure3.
The experiment is derived to provide us with the empirical justifications of the theories such as strategy based theory. Most of the DDM work in laboratories is aiming to simulate human cognitive and transfer humans intents to machines and so increase the level of dependency on such technologies and decreasing the amount of human intervention in many tasks to gain benefits of changing structures within companies or even more with adding value to the quality and efficiency of performing some tasks that depend highly on decision making processes.
Conclusion
Dynamic decision methods are one of the very wide fields that yet didn’t reach its maximum capacities and need much more improvements. The enhancements in computer technologies and researches in different fields lead to a new generation of simulation capabilities which helped in understanding real life conditions and bringing it to laboratories for more experimentation. Those mini-worlds help researchers to find more and test related issues to DMM.
The Dynamic systems are different of the traditional models in that it depends on data to support, not control model development; and it presents a dynamic, not static, environment for decision analysis. Simulation models are powerful tools such as robotics technology which permits the researchers to test the environmental changes and apply if-then and what-if scenarios, and find out how to act in respond to a specific condition or identify what may happen in several situations depending on past knowledge and experiences and current knowledge to make future decisions as shown in the experiment. However the accurate readings and measurements of the situations has a large impact on the improvements we aim to accomplish, also the memory size and how to process the past knowledge in a fast pace in compare to the rate of change in an environment has a large effect on how expandable is the researches will be and what limits it may reach.
The advance developments in the technologies supporting DDM will introduce new business process and change the structure many foundations if the control is directed by one point (smart robots) or by finding automated solution to replace several levels in an organization and leverage computerization and technology like the intelligent robotics.
New economic value will be delivered with the help of new techniques that support complex, high-value, knowledge-based work with solutions that bind improvements in computing, collaboration across groups and join in the global workers. The new class of services — which balance automation with labor — leverages new delivery and commercial models. These services are already providing business agility and savings to our clients today, and more options are emerging daily. [10]
Robotics which is used in the experiment applied in the research paper and other technologies are used to produce the next generation of managing and controlling situations in different fields (vehicles, production and platforms). Those technologies lead the process of DDM in order to monitor, collect through locate and detect then analyze data and processing it efficiently then to be used in making critical decisions and taking necessary actions more and more based on different inputs by users or from the environment.
Choose strategies that meet the established program objectives at the lowest cost from among many alternate simulation outcomes. Models help to quantify cost and performance tradeoffs so that subsequent decision-making is based on more complete and accurate information. Models also help management explore the reasons why long-term costs rise or fall in response to alternative assumptions and policies. System dynamics can fundamentally improve the effectiveness of management decision-making and integrate all elements of management processes.
However the complete dependence on such techniques may be more dangerous than to be expected. Conveying the intents, wills, and desires to machines to be proactive, independence, and reactive may return greater benefits to organizations in different fields line manufacturing, analyzing political situations, diagnosing or cost analysis organizations with caution of the crises that may be caught of deploying those techniques fully and in major areas of life.
Future frame work
More experimentation is needed to ensure the accuracy of such methods before deploying it in the ground of reality; the dynamic decisions should take in account the change in the environment and keep updated with the new situations in order to build decisions based on previous experiences and new facts in the surrounding environment.
References
- Sandra Hirche T. Samad, “Cognitive Control Martin Buss”,The Impact of Control Technology,(2011). Available at www.ieeecss.org.
- Wang,Yingxu, and Ruhe, Guenther. “The Cognitive Process of DecisionMaking”. Journal of Cognitive Informatics and Natural Intelligence. 1(2), 73-85, April-June 2007.
CrossRef
- Gonzalez, Cleotilde, and Jose Quesada. “Learning in dynamic decision making: The recognition process.” Computational & Mathematical Organization Theory 9.4 (2003): 287-304. http://lsa.colorado.edu/papers/CMOTGonzalezQuesada.pdf
CrossRef
- Rai, Laxmisha, and Jiman Hong. “Conceptual Framework for Knowledge-Based Decision Migration in Multi-Component Robots.” Int J Adv Robotic Sy 10.237 (2013).
- JH Kerstholt, JGW Raaijmakers, Decision making in dynamic task environments, Decision making: Cognitive models and explanations, (1997) 205-217.<http://raaijmakers.edu.fmg.uva.nl/PDFs/Kerstholt%20and%20Raaijmakers.pdf>
- Gonzalez, Cleotilde. “Learning to make decisions in dynamic environments: Effects of time constraints and cognitive abilities.” Human Factors: The Journal of the Human Factors and Ergonomics Society 46.3 (2004): 449-460.<http://www.journalclub.uni-hd.de/gonzales.pdf>
- Cheng, Yufang, and Hsiu-Hua Yang. “Intelligent Dynamic Decision-making Model Using in Robot’s Movement.”(2011).
- Gonzalez, Cleotilde, and VarunDutt. “Instance-based learning: integrating sampling and repeated decisions from experience.” Psychological review 118.4 (2011): 523.
- “http://www.decisiondynamics.com/?cmd=SystemDynamics.” . Decision Dynamics inc, 8 Dec 2012. Web. 9 May 2013. <http://www.decisiondynamics.com/?cmd=SystemDynamics>.
- “Smart Hands and Smart Robots.” . Cognizant, n.d. Web. 12 May 2013. <http://www.cognizant.com/InsightsWhitepapers/Smart-Hands-and-Smart-Robots.pdf>.
- “The realization of co-robots acting in direct support of individuals and groups.” . National Robotics Initiative (NRI), n.d. Web. 10 May 2013. <http://www.nsf.gov/pubs/2012/nsf12607/nsf12607.htm>.
- “Dynamic Decision Making Laboratory.” Social and Decision Sciences Department, Carnegie Mellon University.. Web. 10 May 2013. <http://www.hss.cmu.edu/departments/sds/ddmlab/researchn.htm>.
- Gibson, Faison P., Mark Fichman, and David C. Plaut. “Learning in dynamic decision tasks: Computational model and empirical evidence.” Organizational Behavior and Human Decision Processes 71.1 (1997): 1-35.
CrossRef

This work is licensed under a Creative Commons Attribution 4.0 International License.
![Figure1: IBLT process stages.[12]](http://www.computerscijournal.org/wp-content/uploads/2014/10/Vol07_No3_Compu_Fadi_Fig1-150x150.jpg)